Hardware Research

This was in depth research assignment of Industrial Ethernet (IE), whcih refers to the use of standard Ethernet protocols with rugged connectors and extended temperature switches in an industrial environment, for automation or process control. Components used in plant process areas must be designed to work in harsh environments of temperature extremes, humidity, and vibration that exceed the ranges for information technology equipment intended for installation in controlled environments.The use of fiber Ethernet reduces the problems of electrical noise and provides electrical isolation to prevent equipment damage. Some industrial networks emphasized deterministic delivery of transmitted data, whereas Ethernet used collision detection which made transport time for individual data packets difficult to estimate with increasing network traffic. Typically, industrial use of Ethernet use full-duplex standards and other methods so that collisions do not unacceptably influence transmission times.
Drive System Purchase

In this Drive system purchase project, I was chosen to research and decide upon good choices for gear shifters for future purchase. Choosing the correct combination of a motor and a gearbox for a given application is very important, both in the FIRST Robotics Competition (FRC) and in actual engineering projects. Without appropriate motor-gearbox combos, your team will find that your robot does not function as quickly and effectively as intended, and may have a tendency to burn out motors. when researching these drive systems, one must consider our specific needs just like one should consider when buying anything, what were we actually looking for in this product.Our robotics team would benefit from a transmission that had 2 or more gears to shift from and that allows the robot to move swiftly through the game arena and also have quick shifting between gears. In addition the shifter transmission must be light and strong and allow the option to shift using a servo motor and pneumatic air pressure.Lastly, the shifter must be compatible with CIM motors or any other motor that is FRC approved.When comparing drive systems, I looked at the important specifications mentioned above but I also paid special attention to the reviews of each drive system and I choose the 2 CIM Ball Shifter because of the sleek compact design, the ability to choose between pneumatic and servomotor shifting and lastly the amount of power given from 2 CIM motors is very good considering its light weight. Ultimately, I learned how to establish good needs, comparing top product that meet needs and finally choosing the right product.
Hardware Investigation

In the hardware investigation, I took apart a Microsoft 1094 Optical mouse. By using a simplistic method of reverse engineering, I took apart the mouse and took a look at the structural and internal compents, while also drawing a detailed diagram at the same. I did this by taking apart the optical mouse, peering at the circuit contained within, and then putting it back together. I then drew a diagram of the circuit contained within an optical mouse with every part labeled. Through this diagram, I acquired an intimate knowledge of an optical mouse's internal circuitry. Also, I learned about how an optical mouse operates. An optical mouse is a electronic device which shines a light using an LED onto a surface and then detects the reflected light using a CMOS (Complementary metal–oxide–semiconductor ) sensor. The CMOS sensor sends the data it has obtained to a DSP (digital signal processing) chip which then searches for patterns in the data. If the patterns differ then that means that the coordinates of the mouse have changed and the DSP will send the new coordinates to the computer. In conclusion, through the hardware investigation, I have learned about the internal circuity and the operating processes behind an optical mouse.
IP Addressing

An IP address is a fascinating product of modern computer technology designed to allow one computer (or other digital device) to communicate with another via the Internet. IP addresses allow the location of literally billions of digital devices that are connected to the Internet to be pinpointed and differentiated from other devices. In the same sense that someone needs your mailing address to send you a letter, a remote computer needs your IP address to communicate with your computer.
"IP" stands for Internet Protocol, so an IP address is an Internet Protocol address. What does that mean? An Internet Protocol is a set of rules that govern Internet activity and facilitate completion of a variety of actions on the World Wide Web. Therefore an Internet Protocol address is part of the systematically laid out interconnected grid that governs online communication by identifying both initiating devices and various Internet destinations, thereby making two-way communication possible.
An IP address consists of four numbers, each of which contains one to three digits, with a single dot (.) separating each number or set of digits. Each of the four numbers can range from 0 to 255. Here's an example of what an IP address might look like: 78.125.0.209. This innocuous-looking group of four numbers is the key that empowers you and me to send and retrieve data over our Internet connections, ensuring that our messages, as well as our requests for data and the data we've requested, will reach their correct Internet destinations. Without this numeric protocol, sending and receiving data over the World Wide Web would be impossible.
IP addresses can be either static or dynamic. Static IP addresses never change. They serve as a permanent Internet address and provide a simple and reliable way for remote computers to contact you. Static IP addresses reveal such information as the continent, country, region, and city in which a computer is located; the ISP (Internet Service Provider) that services that particular computer; and such technical information as the precise latitude and longitude of the country, as well as the locale, of the computer. Many websites provide IP address look-up services to their visitors, free of charge. If you're curious about your own IP address, you can locate these websites by performing a Google search.
"IP" stands for Internet Protocol, so an IP address is an Internet Protocol address. What does that mean? An Internet Protocol is a set of rules that govern Internet activity and facilitate completion of a variety of actions on the World Wide Web. Therefore an Internet Protocol address is part of the systematically laid out interconnected grid that governs online communication by identifying both initiating devices and various Internet destinations, thereby making two-way communication possible.
An IP address consists of four numbers, each of which contains one to three digits, with a single dot (.) separating each number or set of digits. Each of the four numbers can range from 0 to 255. Here's an example of what an IP address might look like: 78.125.0.209. This innocuous-looking group of four numbers is the key that empowers you and me to send and retrieve data over our Internet connections, ensuring that our messages, as well as our requests for data and the data we've requested, will reach their correct Internet destinations. Without this numeric protocol, sending and receiving data over the World Wide Web would be impossible.
IP addresses can be either static or dynamic. Static IP addresses never change. They serve as a permanent Internet address and provide a simple and reliable way for remote computers to contact you. Static IP addresses reveal such information as the continent, country, region, and city in which a computer is located; the ISP (Internet Service Provider) that services that particular computer; and such technical information as the precise latitude and longitude of the country, as well as the locale, of the computer. Many websites provide IP address look-up services to their visitors, free of charge. If you're curious about your own IP address, you can locate these websites by performing a Google search.
Subnetting

Subnetting is a method for getting the most out of the limited 32-bit IPv4 addressing space and reducing the size of the routing tables in a large internetwork. With any address class, subnetting provides a means of allocating a part of the host address space to network addresses, which lets you have more networks. The part of the host address space allocated to new network addresses is known as the subnet number.
In addition to making more efficient use of the IPv4 address space, subnetting has several administrative benefits. Routing can become very complicated as the number of networks grows. A small organization, for example, might give each local network a class C number. As the organization grows, administering a number of different network numbers could become complicated. A better idea is to allocate a few class B network numbers to each major division in an organization. For instance, you could allocate one to Engineering, one to Operations, and so on. Then, you could divide each class B network into additional networks, using the additional network numbers gained by subnetting. This can also reduce the amount of routing information that must be communicated among routers.
In addition to making more efficient use of the IPv4 address space, subnetting has several administrative benefits. Routing can become very complicated as the number of networks grows. A small organization, for example, might give each local network a class C number. As the organization grows, administering a number of different network numbers could become complicated. A better idea is to allocate a few class B network numbers to each major division in an organization. For instance, you could allocate one to Engineering, one to Operations, and so on. Then, you could divide each class B network into additional networks, using the additional network numbers gained by subnetting. This can also reduce the amount of routing information that must be communicated among routers.
FLL World Class Challenge-Mission:Adapting to Changing Condtions

The specific task that we must solve for the FLL world class challenge is that there is a model that spins on a static base; our objective is to rotate the model 90 Degrees.(15 points are given)
Driving our robot forward 15” from the starting point and having an “arm” (Lego piece) extended outwards to hit the model as it passes it.
Driving our robot forward 15” from the starting point and having an “arm” (Lego piece) extended outwards to hit the model as it passes it.
| design_report_for_mission.docx |
Automation Research

Manipulators: In robotics, a manipulator is a device used to manipulate materials without direct human contact. the applications were originally for dealing with radioactive or bio-hazardous materials, using robotics arms.
Actuators: An actuator is a type of motor that is responsible for the movement or control of a mechanism or system. in all cases, it is operated by a source of energy; electric current, hydraulic fluid pressure and pneumatic pressure, kinetic energy etc.
I researched an manipulator made by Mitsubishi industrial automation, the RV-2F Vertical Type Robot. A brief overview of the manipulator:
The F Series offers class leading speed, precision and ease of integration. All units are built to comply with ANSI/RIA/ISO 10218-1-2007 safety standards and are available in CE models for global acceptance. A long list of standard features makes this series a perfect choice for applications across many industries. SCARA type robots are available in ISO3 clean room and mist-proof versions. Payloads range from 3Kg to 20Kg with 350mm to 1000mm reaches. Vertically Articulated type robots are available in ISO3 clean room and mist-proof versions. Payloads range from 2KG to 20KG with 504mm to 1503mm reaches.
Actuators: An actuator is a type of motor that is responsible for the movement or control of a mechanism or system. in all cases, it is operated by a source of energy; electric current, hydraulic fluid pressure and pneumatic pressure, kinetic energy etc.
I researched an manipulator made by Mitsubishi industrial automation, the RV-2F Vertical Type Robot. A brief overview of the manipulator:
The F Series offers class leading speed, precision and ease of integration. All units are built to comply with ANSI/RIA/ISO 10218-1-2007 safety standards and are available in CE models for global acceptance. A long list of standard features makes this series a perfect choice for applications across many industries. SCARA type robots are available in ISO3 clean room and mist-proof versions. Payloads range from 3Kg to 20Kg with 350mm to 1000mm reaches. Vertically Articulated type robots are available in ISO3 clean room and mist-proof versions. Payloads range from 2KG to 20KG with 504mm to 1503mm reaches.
Computer Aided Design- Auto-desk Inventor

Autodesk Inventor is an application that one to create a dimension design based on theoretical ideas that allows engineers to test out their ideas before actually creating it, due to vast circumstances one must consider when design: the material, the structural points and many more. These designs are built using the vast variety of tools, too many for one to learn within a week. Autodesk like many other CADs have many abilities to get as close to building the design in real life. An example of one of these tools is the material selector and stress test which allows the user to choose any material and test the strength of it that is needed to meet the needs of the user. CAD is an application the revolutionized the modern design world and is used in almost all aspects of design today.
CAD Design Project- FRC 2015 Recycle Rush

Theory of operation: The design proposed will consist of two parallel metal tubes well , my design would be able to grip the totes and push and pick up totes in various heights with a piston loaded gripper, for the gripper an arm 2ft and 6 inches with two semicircle shaped grippers with a distance between the two gripper arms that is 16 inches and extends to of 30 with help to a pneumatic piston extended the distance from one arm to the other. The vision sensor will be placed between both arms in which the robot will be able to align its grippers to successfully pick up the totes or recycling container, without dead reckoning.
Well this design may not be the best, however it easy to make and allows driver to use piston to punch totes out and pull totes that are stacked beside each other, this design will allow the driver to be accurate when picking up totes using the vision sensor and with an pneumatic piston pulling and pushing totes we will be able to pick up totes in almost all orientations. Future ideas and modifications would be giving the shooter well piston more power, more angle flexibility and programming components to work with precision and efficiency.
Well this design may not be the best, however it easy to make and allows driver to use piston to punch totes out and pull totes that are stacked beside each other, this design will allow the driver to be accurate when picking up totes using the vision sensor and with an pneumatic piston pulling and pushing totes we will be able to pick up totes in almost all orientations. Future ideas and modifications would be giving the shooter well piston more power, more angle flexibility and programming components to work with precision and efficiency.
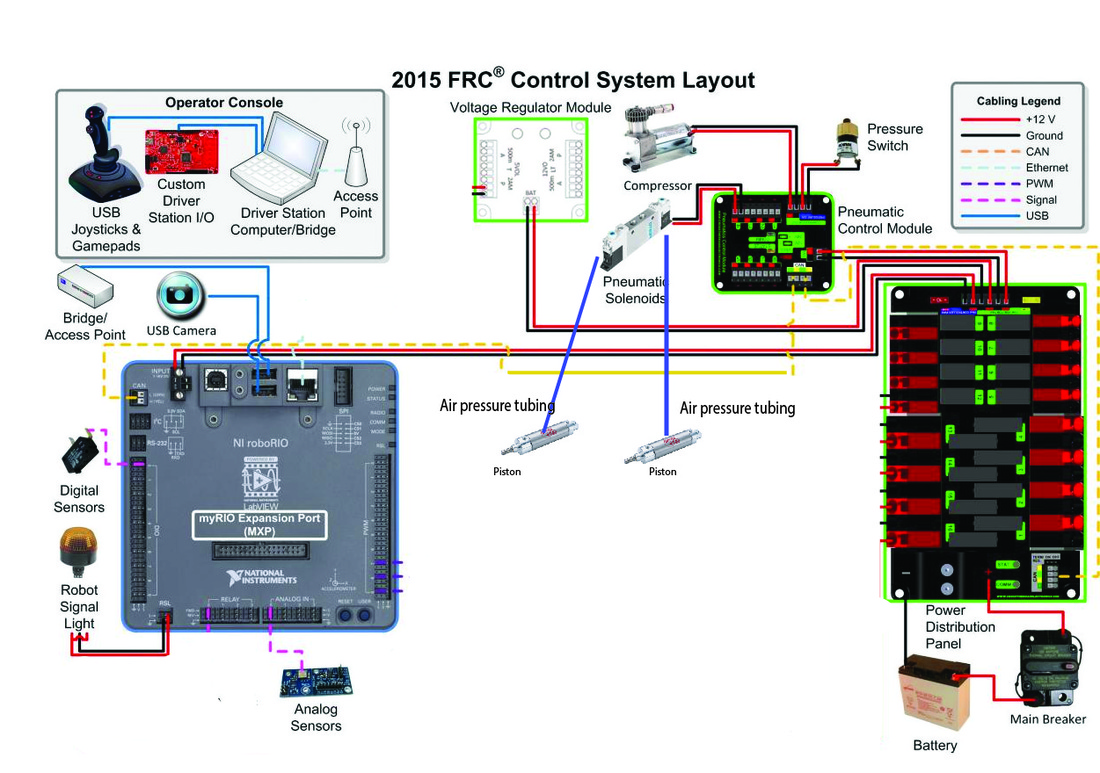
FRC Control System
Test procedure proposal: place robot in open area
Pre-programming:
Autonomous mode: set sensors to compress arms with totes when tote is (x) distance away from sensor, set piston to extend when robot is (x) distance away from placement, piston pushes the tote out (x) seconds after arms are opened.
Step:
1. turn robot on
2. start autonomous mode
3. move robot towards tote
4. allow robot to sense tote using programmed sensors that close arms
5. release arms and activate piston to push tote
Normal driving:
pre-program: set sensors to close gripper when ball is (x) distance away from sensor, set servo motor to respond to analog/ joystick controlled angle then lock at angle when button is pushed, set grippers to open when button is pressed activate piston when button is pressed.
Normal drive:
Step:
1. turn robot on
2. start normal mode
3. drive robot towards tote
4. allow robot to sense tote using programmed sensors then close arms if tote is aligned with sensor
5. then driver must use joystick to drive robot to drop area, and then use joystick button to open arms
6. another button is used to push tote out with piston
Psuedocode:
· declare robot class: sample robot
· initiate joystick
· define variables; solenoid 1 and solenoid 2
· enable joystick
· when joystick button is pressed; solenoid 1 stays on while solenoid 2 turns on and off
· when button is released; solenoid 1 shuts off and solenoid 2 turns on and off
· end program
Pre-programming:
Autonomous mode: set sensors to compress arms with totes when tote is (x) distance away from sensor, set piston to extend when robot is (x) distance away from placement, piston pushes the tote out (x) seconds after arms are opened.
Step:
1. turn robot on
2. start autonomous mode
3. move robot towards tote
4. allow robot to sense tote using programmed sensors that close arms
5. release arms and activate piston to push tote
Normal driving:
pre-program: set sensors to close gripper when ball is (x) distance away from sensor, set servo motor to respond to analog/ joystick controlled angle then lock at angle when button is pushed, set grippers to open when button is pressed activate piston when button is pressed.
Normal drive:
Step:
1. turn robot on
2. start normal mode
3. drive robot towards tote
4. allow robot to sense tote using programmed sensors then close arms if tote is aligned with sensor
5. then driver must use joystick to drive robot to drop area, and then use joystick button to open arms
6. another button is used to push tote out with piston
Psuedocode:
· declare robot class: sample robot
· initiate joystick
· define variables; solenoid 1 and solenoid 2
· enable joystick
· when joystick button is pressed; solenoid 1 stays on while solenoid 2 turns on and off
· when button is released; solenoid 1 shuts off and solenoid 2 turns on and off
· end program
|
|
|
|
| ||||||||||||||||||||||||
